

|
1. propeller 일반
동력 글라이더 혹은 동력비행기에 있어서 propeller는 필수품이다. 처음에는 추천하는 대로 사용하다가 조금 익숙해 지거나, propeller가 깨어지고 나면 혹은 처음 선택한 propeller의 효율이 떨어진다고 판단될 때 기본적인 사양과 이름을 알아 두면 도움이 된다.
2. 모양과 기능에 따른 분류
● 일반 propeller (2블레이드) ● 3 플레이드 propeller ● 폴딩 propeller ● 역피치 propeller
3. 재질에 따른 분류
가. 플라스틱(수지)
수지라고는 하지만, 대게 수지에 유리섬유 같은 복합재료를 섞어서 사용한다.
나. 우드(나무)
나무로 되어 있어서 팰러의 밸런스를 맞추기 좋고, 외관도 수려하다. 또한 랜딩기어 없이 착륙하는 경우 팰러가 바닥에 닿아서 모터의 축이 휜다든지 하는 경우가 적다. 이때 Propeller가 먼저 부러지기 때문이다.
다. 카본
아주 날카롭게 가공되어 있어서 효율이 좋다. 또한 높은RPM에서 견딜 수 있는 구조로 되어 있지만, 충격에 다소 약하다.
라. 기타 재료
4. APC Propeller를 살펴보면
APC Propeller를 보면 아래와 같이 분류되어 있다. Sport Prop : 엔진용, 적정RPM 약 12,000 Electric Prop : 모터직결용, 적정RPM 약 8,000 Slo-flyer Prop : 모터기어다운용, 적정RPM 약 4,000
위에서 아래로 갈수록 블레이드의 두께가 얇아지고 폭이 넓어진다. 서로 용도가 다르므로 같은 규격의 Propeller라 하더라도 적정RPM 에서의 효율차이는 엄청 크다.
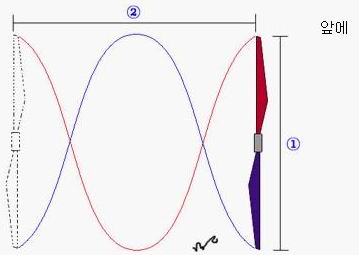
5. Propeller의 규격 읽기 일반적으로 Propeller의 규격을 말하기를 “5.5X4.5”이런 식으로 나타낸다. 이때 앞에 오는 5.5는 Propeller의 직경을 이야기 하며 4.5는 피치를 뜻한다. 이때 단위는 인치를 사용한다. 피치라는 것은 Propeller가 한바퀴 회전할 때 앞으로 전진하는 거리를 나타낸다. 즉 나사를 이야기 할 때와 같다고 보시면 된다.
예를 들자면 "5.4x4.5" ("5.5에 4.5" 이런 식으로 부른다.)의 경우를 보면 직경이 5.5인치(13.97mm)가 되며, propeller가 한바퀴 회전하면 4.5인치(11.43mm)를 전진하게 되는 것이다.
아래 그림을 보면 ①은 첫번째 "5.5"에 해당하며 ②는 "4.5"에 해당된다.
6. Propeller 규격에 따른 효과 10x2, 5x4의 2개의 Propeller가 있다면, 양쪽다 한바퀴 돌았을때 20만큼의 부하률이 발생한다. 즉 부하률은 같다.
직경이 크고 피치가 작은(예,10x2)경우 스피드는 줄어들지만, 토크는 좋아진다. 반대로 직경이 작고 피치가 큰 경우(예,5x4)는 수평비행 속도가 늘어나지만 토크는 줄어든다. 10x2와 5x4는 바람을 밀어내는 면적은 같지만 진행한 거리는 5x4가 2배가 된다. 토크가 크다는 것은 일반적으로 상승력이 좋다고 보시면 된다.
브레이드(날개)가 작을수록 효과적이다. 4브레이드나 3브레이드는 모양은 좋지만, 효율적인 측면으로 보면 2브레이드 보다 못하다고 한다. 그렇다면 1브레이드(날개 1개)는 없는가? 있습니다. 일부 레이싱 기종이 1브래이드를 사용하는데, 이때 한쪽 날개만 있으면 균형이 맞지 않기 때문에 반대편에는 균형추를 달게 된다.
그렇다면 무조건 큰 것 쓰면 되느냐? Propeller의 선택을 잘 못하면 효율이 떨어지게 되고, 심하면 부하가 허용 용량보다 증가하여 변속기에 흐르는 전류도 증가하게 된다. 만약 변속기의 용량이 부족하게 되면 대게의 경우 변속기가 모터로 가는 전원을 차단하고 부하가 낮아질 때 까지 기다리게 되지만, 일부 변속기(보호 회로가 없는)는 타 버리기도 한다.
보호 회로가 있다고 하더라도 대게 온도에 의한 감지를 하기 때문에 항상 보호 할 수 있는 것은 아니다. 그러니 적당한 Propeller의 선택이 중요하다고 할 수 있다.
7. 엔진에 맞는 Propeller 규격 가. 2 사이클 엔진 Propeller 규격
나. 4 사이클 엔진 Propeller 규격
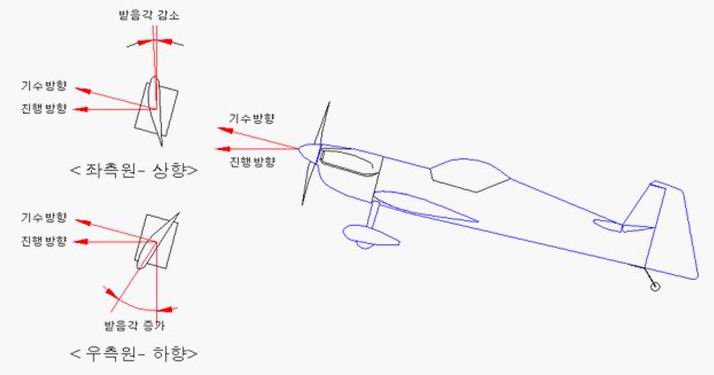
아. 프로펠러의 비균형 부하 (Symmetrical Loading of Propeller, P-Factor)
기체가 저속으로 받음각을 크게하여 수평으로 진행할때에는 기체의 진행방향과 프로펠러의 축간에는 각도가 생긴다. 이때에 프로펠러가 좌측의 반원을 그리며 올라갈때에는 프로펠러의 받음각이 상대적으로 감소되며 프로펠러가 우측의 반원을 그리며 내려갈 때에는 프로펠러의 받음각이 상대적으로 증가되어 결국 우측반원의 프로펠러 양력이 좌측반원의 양력보다 커져서 기체가 요오축의 좌측으로 회전하는 현상이 나타나게 된다.
패턴기에서 스핀을 하기위해 트로틀을 낮추고 기체의 속도를 줄이면서 진행방향을 그대로 유지시키기 위해 엘리베이터를 서서히 당기며 받음각을 증가시켜 나가면 실속직전에 기체가 요오축에 대해 좌측으로 회전하는 것을 볼수 있다.
회전하고 있는 물체는 그 회전축을 바꾸지 않는 성질을 가지고 있고 이 원리로 돌고 있는 팽이가 쓰러지지 않는 것은 누구나 알고 있는 과학상식이며 또한 이 원리를 이용한 자이로 센서는 모형헬리콥터에 필수적인 것으로 널리 사용되고 있다.
대형기에서 이륙을 위해 가속하다가 속도가 붙으면서 꼬리가 들릴 때, 즉 핏치 다운하면서 Yaw Left하는 현상이 쉽게 발견된다. 기체의 진행방향을 계속 직선으로 유지하려면 이 순간에 거의 동시에 반사적으로 러더를 약간 우측으로 틀어 주어야만 한다.
|




출처: 무선모형 원문보기 글쓴이: 스카이랜드
